上讲中介绍了MDP这一基本概念。之后的lecture以此出发,介绍不同情况下的最优策略求解方法。本节假设我们对MDP过程的所有参数都是已知的,这时候问题较为简单,可以直接得到确定的解。这种问题叫做planning问题,求解方法是动态规划。
动态规划
动态规划是计算机科学中常用的思想方法。对于一个复杂的问题,我们可以将它划分成若干的子问题,然后再将子问题的解答合并为原问题的解。要想用动态规划解决问题,该问题必须满足以下两个条件:
- 最优子结构。能够分解为若干子问题。
- 子问题重叠。分解后的子问题存在重叠,我们可以通过记忆化的方法进行缓存和重用。
MDP问题的求解符合上述要求。贝尔曼方程给出了原问题递归的分解(考虑状态$S$时,我们可以考虑从状态$s$出发的下一个状态$s^\prime$,而在考虑状态$s^\prime$的时候,问题和原问题是一样的,只不过问题规模变小了);而使用值函数我们相当于记录了中间结果。值函数充当了缓存与记事簿的作用。
迭代策略估计
给定一个策略,我们想要知道该策略的期望回报是多少,也就是其对应的值函数$v_\pi(s)$。首先回顾一下上讲中得到的值函数的贝尔曼方程如下(全概率公式):
我们有如下的迭代估计方法:在每一轮迭代中,对于所有状态$s\in \mathcal{S}$,使用上式利用上轮中的$v(s^\prime)$更新$v_{k+1}(s)$,直到收敛。
给出下面的算例。$4\times 4$的格子中,$0$和$15$是出口。在状态$0$和$15$向自身转移时,奖赏为$0$。其他状态来回转换时,奖赏均为$-1$。如果当前移动使得更新后的位置超过格子的边界,则状态仍然保持原状。求采取随机策略$\pi$,即每个状态下,上下左右四个方向移动的概率均为$0.25$时候各个状态的值函数$v_\pi(s)$。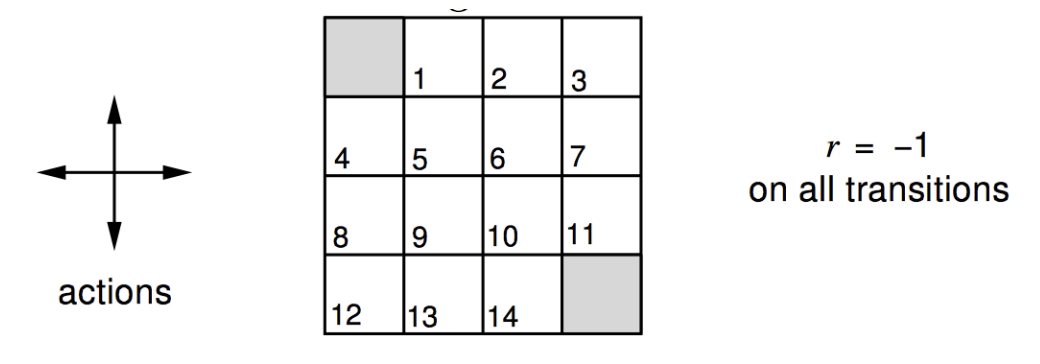
这里直接将Python实现的计算过程贴在下面,注意在每一轮迭代开始前,暂存当前值函数的副本。
1 | import numpy as np |
策略的改进
评估过某个策略的值函数后,我们可以改进该策略,使用的方法为贪心法。具体来说,在某个状态$s$时,我们更新此时的动作为能够使得$Q(s,a)$取得最大,接下来继续执行原策略的那个动作(也就是我们只看一步)。如下所示:
以上小节中给出的算例为例,最终值函数结果为: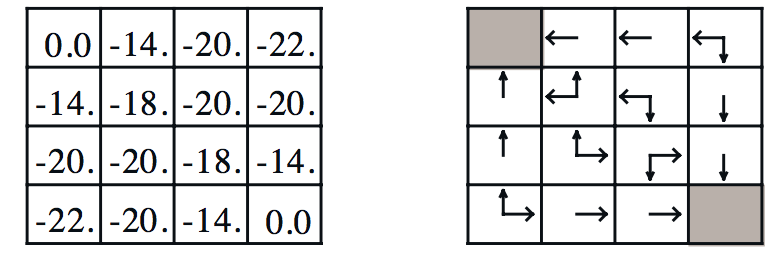
那么对于位置$1$,由于其左方的状态值函数最大,为$0$。所以,我们认为从位置$1$出发的最优策略应该是向左移动。其他同理。这样,对于任何一个状态,它都可以通过选取$q(s,a)$最大的那个动作达到下一个状态,再递推地走下去(如右侧图中的箭头所示)。
为什么这种贪心方法有效呢?这里直接把证明过程粘贴如下。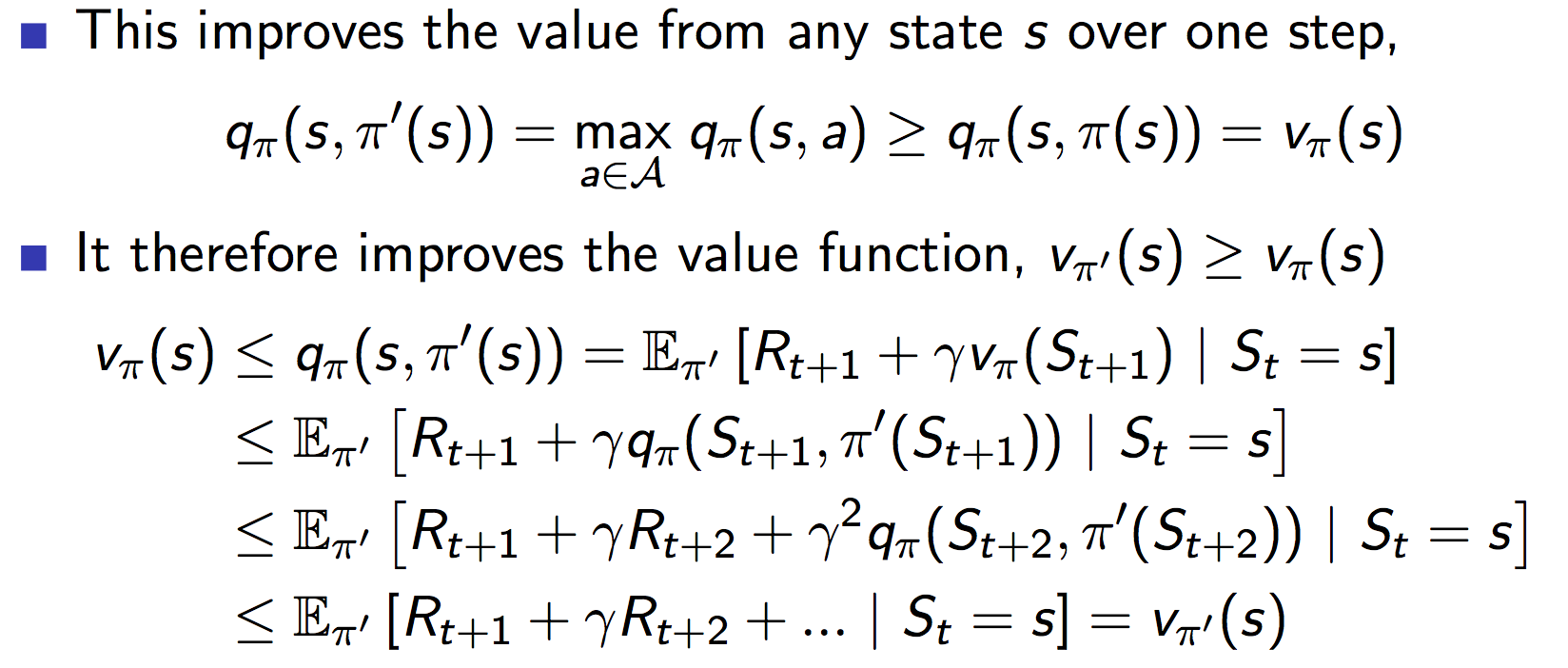
当上述单步提升不再满足时,上图中的不等号就变成了等号,算法收敛到了最优解。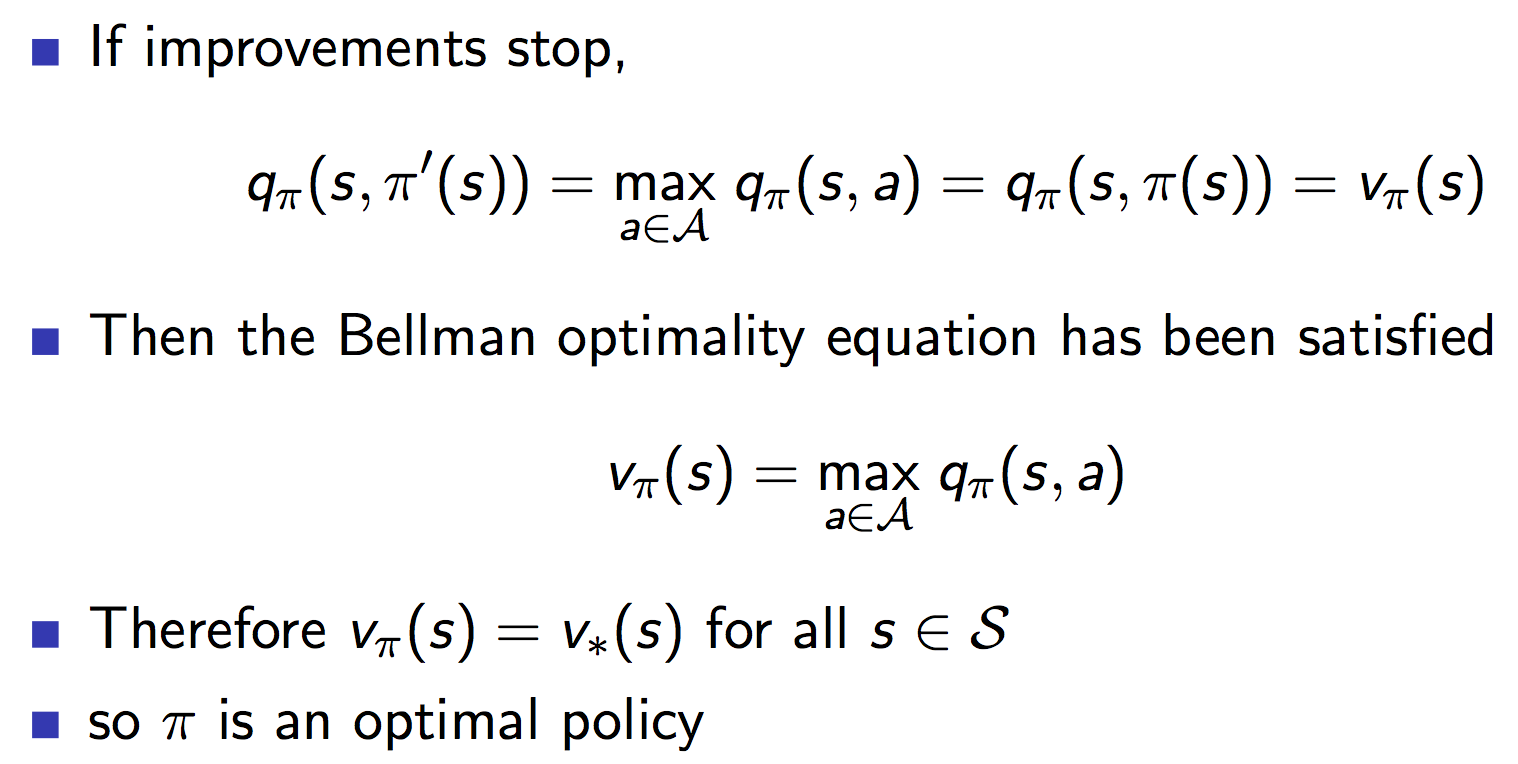
值迭代
首先介绍最优化定理(也可以解释上述贪心方法为什么work,类比图中最短路径的分析)。这条定理是说某个策略对于状态$s$是最优的,当且仅当,对于每个由$s$出发可达的状态$s^\prime$,都有,该策略对$s^\prime$也是最优的。这提示我们,可以通过下面的式子更新$s$处的最优值函数的值。
通过迭代地进行这个步骤,就能够收敛到最优值函数。每次迭代中,都首先计算最后一个状态的值函数,然后逐渐回滚,更新前面的。如下图所示(求取最短路径):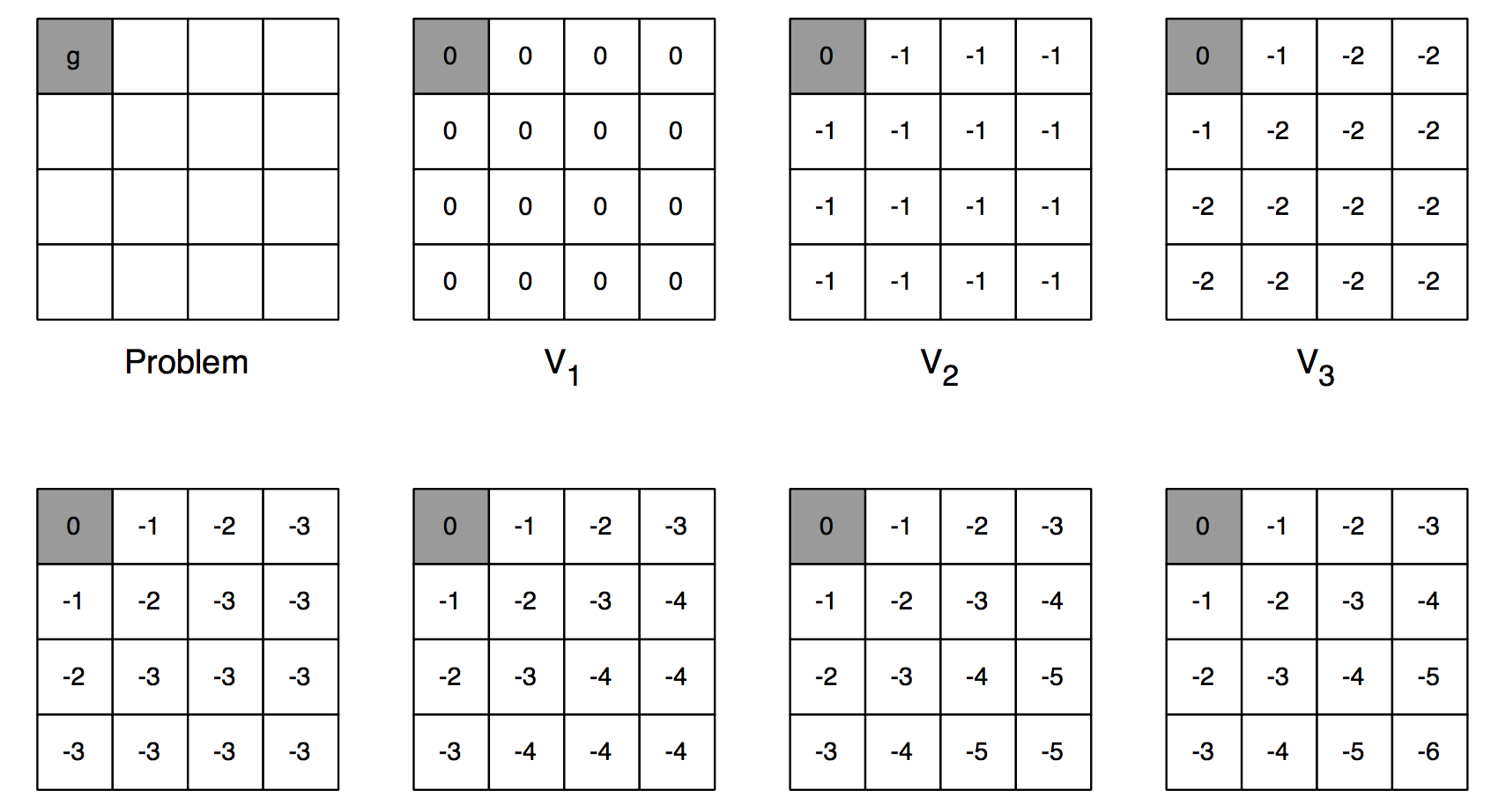
每轮迭代,都从$1$号开始。考虑$1$号,第一轮时候,大家都是$0$。当选取动作为向左移动时候,上式取得最大值。所以$s^\prime=0$。更新之后,其值变为了$-1$(因为把reward加上去了),接下来更新其他。并开始新的迭代轮次,最终收敛。
注意到,这里和上面策略迭代-改进来求取最优策略不同,这里并不存在一个显式的策略。或者说,在策略迭代的时候,我们是要选取某个动作$a$,使得值-动作函数$q(s,a)$取值最大。而在值迭代的过程中,我们只关心下个状态的值函数和在这个转换过程中得到的奖励。
异步DP
上面我们讨论的是同步迭代更新。也就是说,在更新前,我们要先备份各个状态的值函数,更新时是使用状态$s^\prime$的旧值来计算$s$的新值。如下图所示: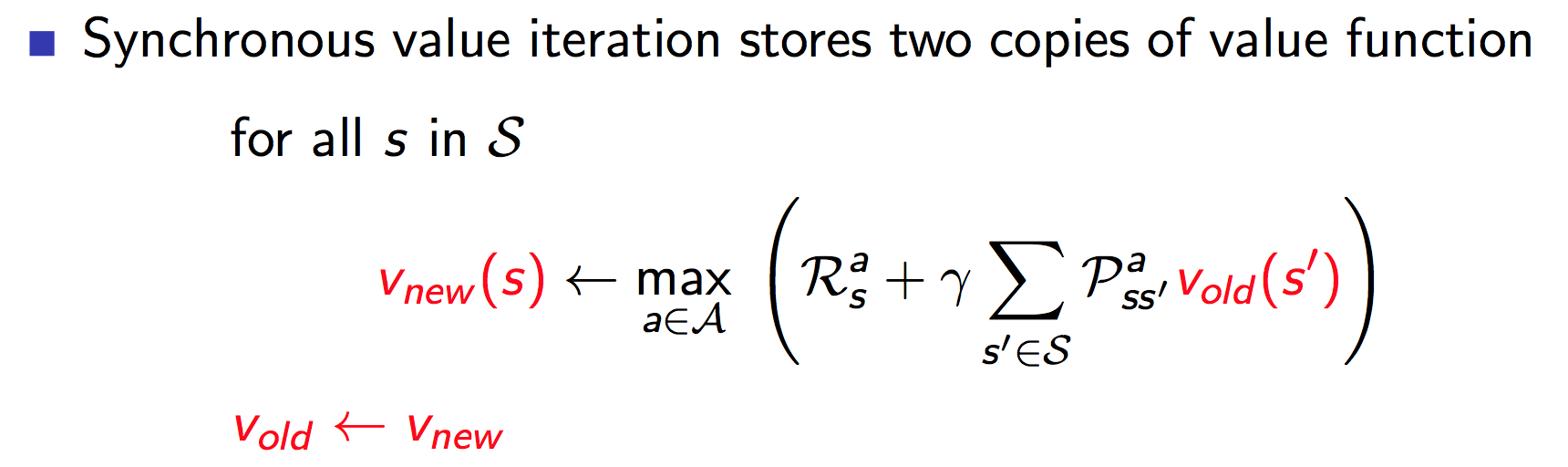
上面讨论了同步迭代的三个主要问题:
我们也可以使用异步方法。主要包括以下三种:
就地(in-place) DP
就地DP只存储一份值函数,在更新时,有可能在使用新的状态值函数$v_{\text{new}}(s^\orime)$来更新$v(s)$。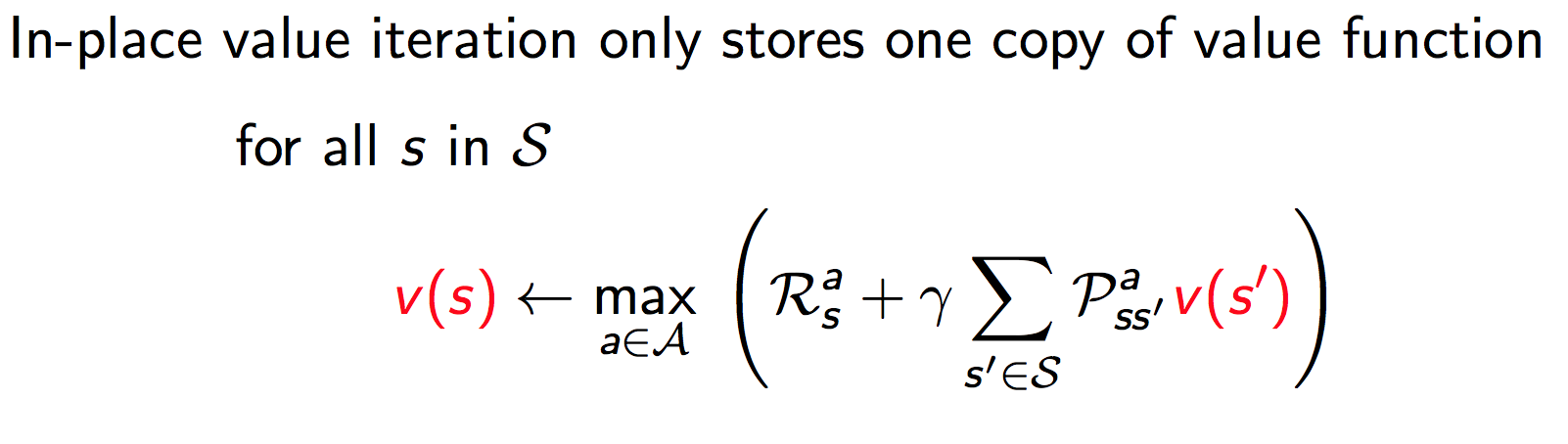
带有优先级的状态扫描(Prioritized Sweeping)
根据贝尔曼方程的误差来指示更新先更新哪个状态的值函数,即
实现的具体细节如下: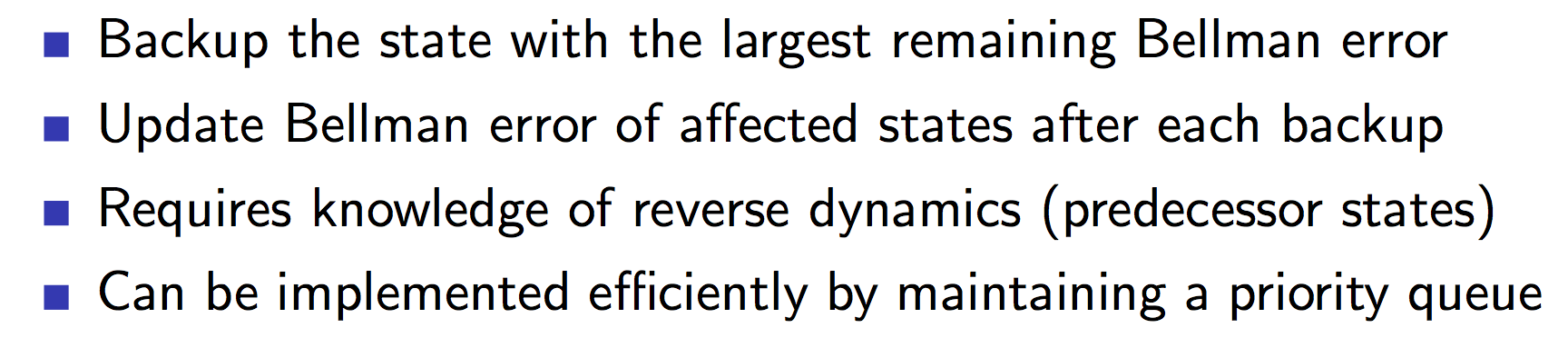
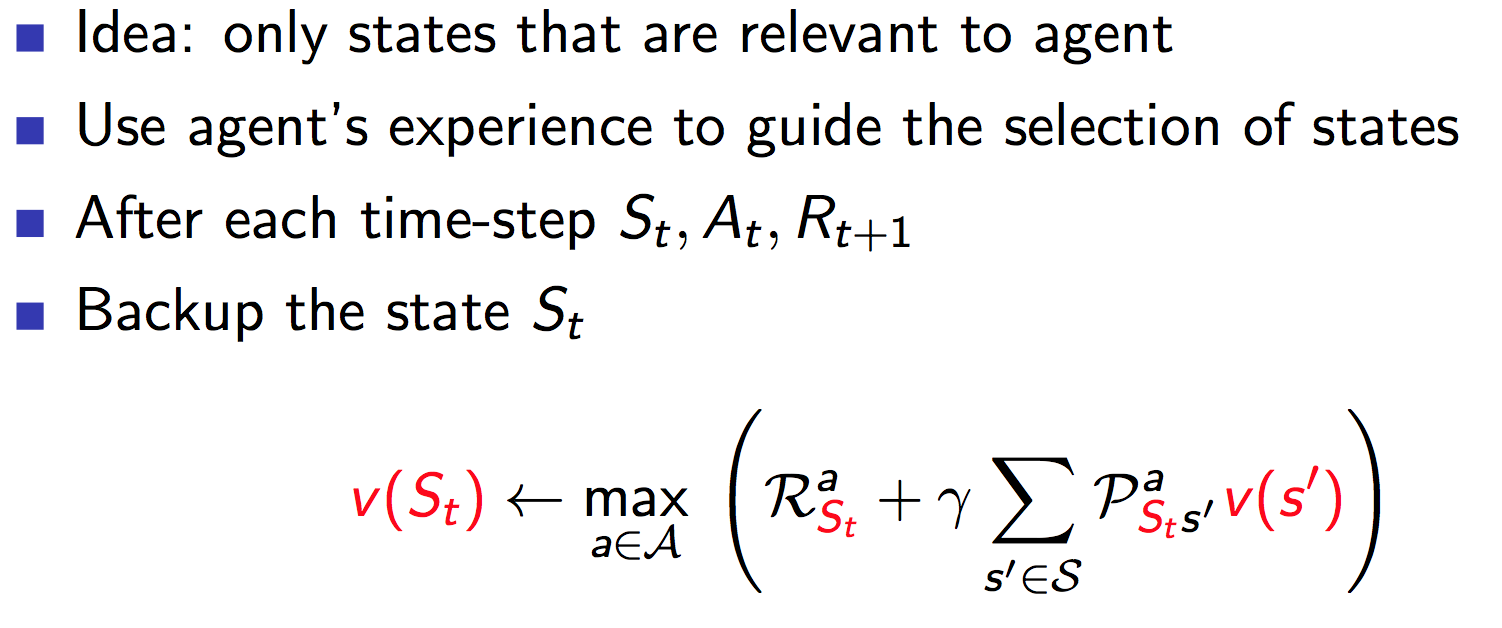
实时DP
使用智能体与环境交互的经验(experience)来挑选状态。