第六周的课程主要讲解了用于神经网络训练的梯度下降方法,首先对比了SGD,full batch GD和mini batch SGD方法,然后给出了几个用于神经网络训练的trick,主要包括输入数据预处理(零均值,单位方差以及PCA解耦),学习率的自适应调节以及网络权重的初始化方法(可以参考各大框架中实现的Xavier初始化方法等)。这篇文章主要记录了后续讲解的几种GD变种方法,如何合理利用梯度信息达到更好的训练效果。由于Hinton这门课确实时间已经很久了,所以文章末尾会结合一篇不错的总结性质的博客和对应的论文以及PyTorch中的相关代码,对目前流行的梯度下降方法做个总结。
下图即来自上面的这篇博客。
Momentum
我们可以把训练过程想象成在权重空间的一个质点(小球),移动到全局最优点的过程。不同于GD,使用梯度信息直接更新权重的位置,momentum方法是将梯度作为速度量。这样做的好处是,当梯度的方向一直不变时,速度可以加快;当梯度方向变化剧烈时,由于符号改变,所以速度减慢,起到了GD中自适应调节学习率的过程。
具体来说,我们利用新得到的梯度信息,采用滑动平均的方法更新速度。式子中的$\epsilon$为学习率,$\alpha$为momentum系数。
为了说明momentum确实对学习过程有加速作用,假设一个简单的情形,即运动轨迹是一个斜率固定的斜面。那么我们有梯度$g$固定。根据上面的递推公式可以得到通项公式(简单的待定系数法凑出等比数列):
由于$\alpha < 0$,所以当$t = \infty$时,只剩下了后面的常数项,即:
也就是说,权重更新的幅度变成了原来的$\frac{1}{1-\alpha}$倍。若取$\alpha=0.99$,则加速$100$倍。
Hinton给出的建议是由于训练开头梯度值比较大,所以momentum系数一开始不要过大,例如可以取$0.5$。当梯度值较小,训练过程被困在一个峡谷的时候,可以适当提升。
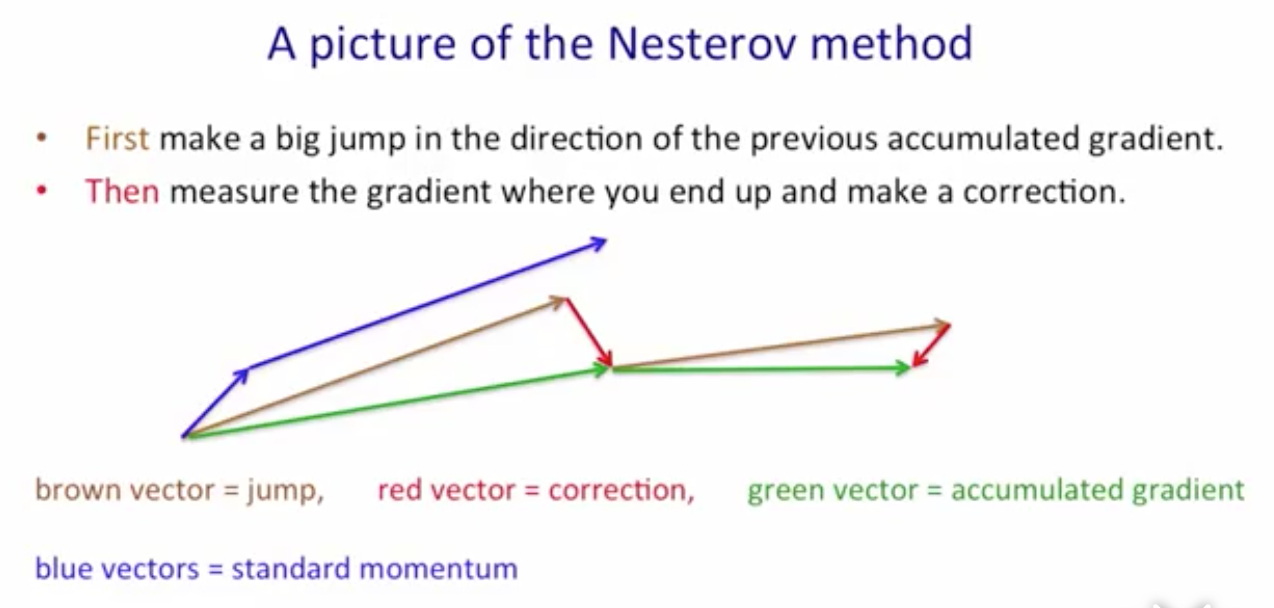
一种改进方法由Nesterov提出。在上面的方法中,我们首先更新了在该处的累积梯度信息,然后向前移动。而Nesterov方法中,我们首先沿着累计梯度信息向前走,然后根据梯度信息进行更正。
Adaptive Learning Rate
这种方法起源于这样的观察:在网络中,不同layer之间的权重更新需要不同的学习率。因为浅层和深层的layer梯度幅值很可能不同。所以,对不同的权重乘上不同的因子是个更加合理的选择。
例如,我们可以根据梯度是否发生符号变化按照下面的方式调节某个权重$w_{ij}$的增益。注意$0.95$和$0.05$的和是$1$。这样可以使得平衡点在$1$附近。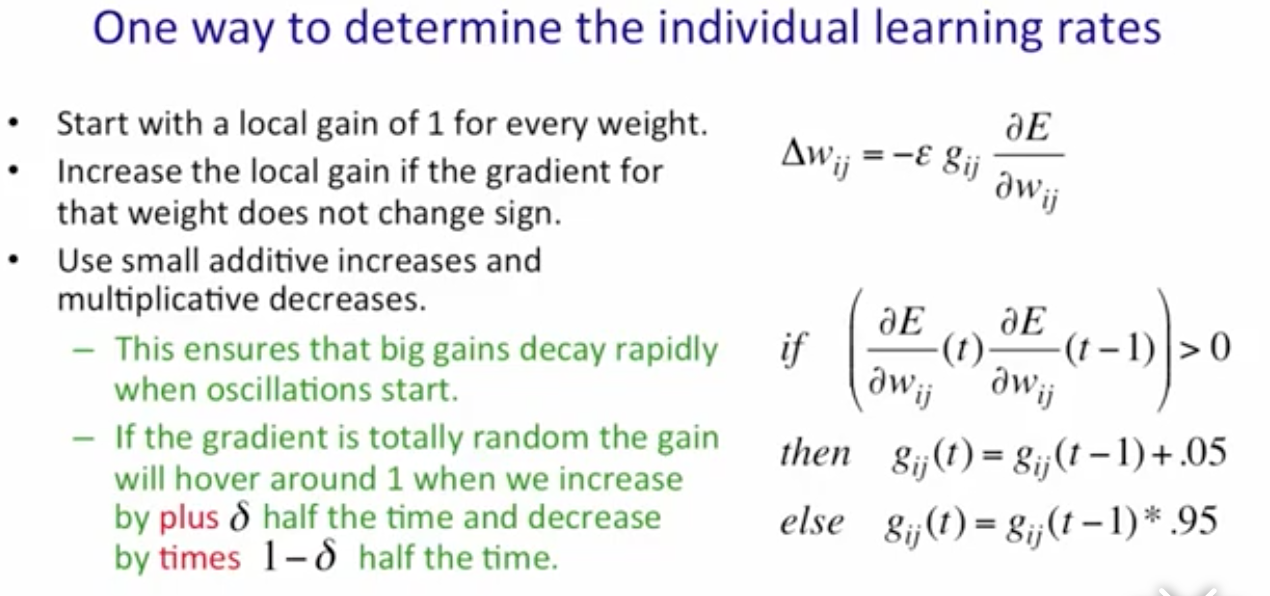
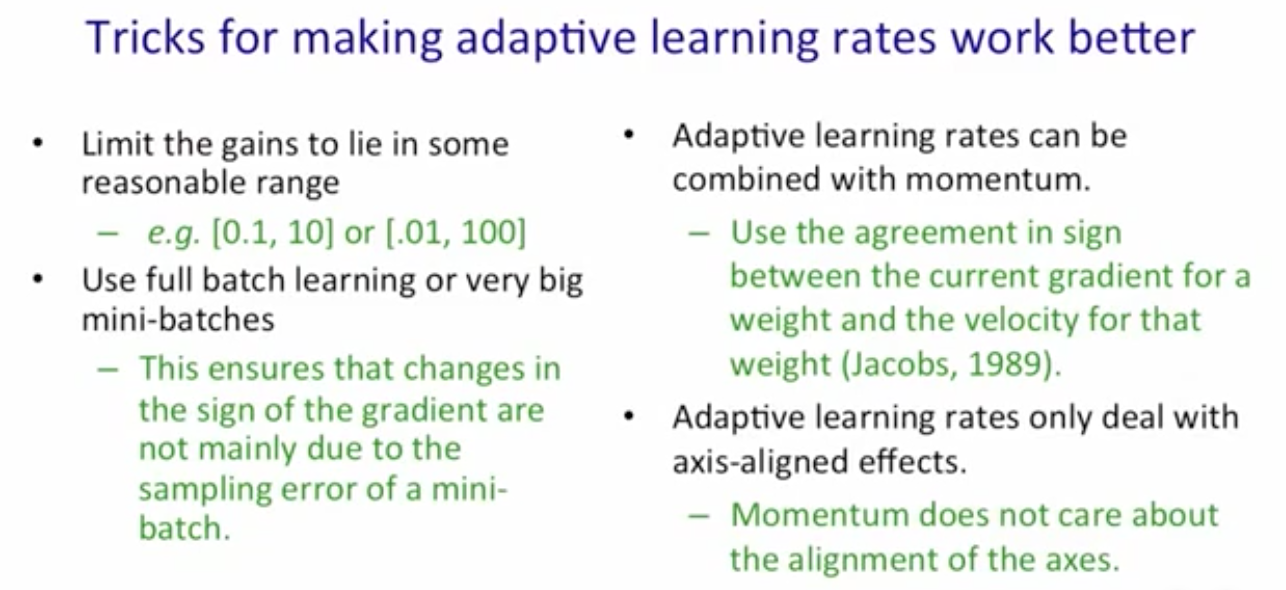
下面是使用这种方法的几个trick,包括限幅,较大的batch size以及和momentum的结合。
RMSProp
rprop利用梯度的符号,如果符号保持不变,则相应增大step size;否则减小。但是只能用于full batch GD。RMSProp就是一种可以结合mini batch SGD和rprop的一种方法。
我们使用滑动平均方法更新梯度的mean square(即RMS中的MS得来)。
然后,将梯度除以上面的得到的Mean Square值。
RMSProp还有一些变种,列举如下: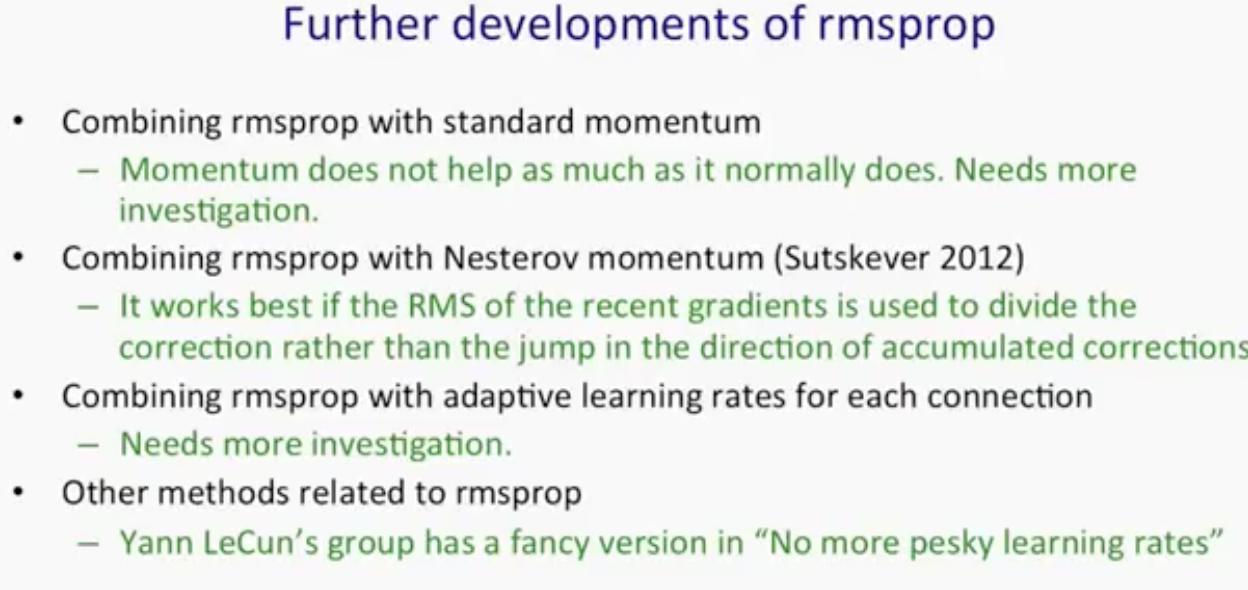
课程总结
- 对于小数据集,使用full batch GD(LBFGS或adaptive learning rate如rprop)。
- 对于较大数据集,使用mini batch SGD。并可以考虑加上momentmum和RMSProp。
如何选择学习率是一个较为依赖经验的任务(网络结构不同,任务不同)。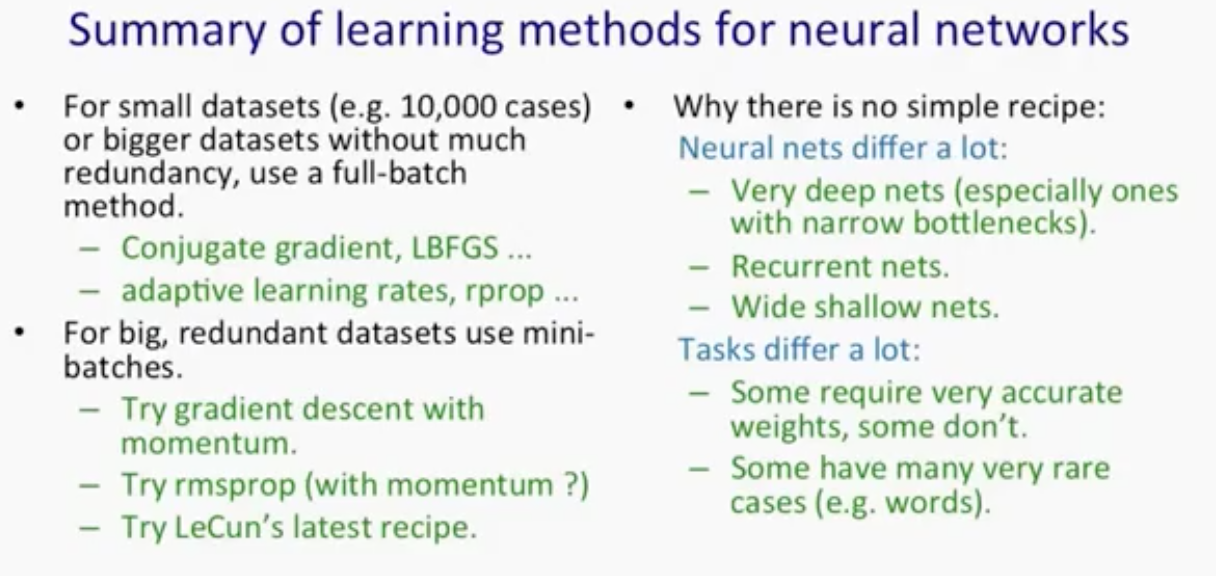
“Modern” SGD
从本部分开始,我将转向总结摘要中提到的那篇博客中的主要内容。首先,给出当前基于梯度的优化方法的一些问题。可以看到,之后人们提出的改进方法就是想办法解决对应问题的。由于与Hinton课程相比,这些方法提出时间(也许称之为流行时间更合适?做数学的那帮人可能很早就知道这些优化方法了吧?)较短,所以这里仿照Modern C++之称呼,就把它们统一叫做Modern SGD吧。。。
- 学习率通常很难确定。学习率太大?容易扯到蛋(loss直接爆炸);学习率太小,训练到天荒地老。。。
- 学习率如何在训练中调整。目前常用的方法是退火,要么是固定若干次迭代之后把学习率调小,要么是观察loss到某个阈值后把学习率调小。总之,都是在训练开始前,人工预先定义好的。而这没有考虑到数据集自身的特点。
- 学习率对每个网络参数都一样。这点在上面课程中Hinton已经提到,引出了自适应学习率的方法。
- 高度非凸函数的优化难题。以前人们多是认为网络很容易收敛到局部极小值。后来有人提出,网络之所以难训练,更多是由于遇到了鞍点。也就是某个方向上它是极小值;而另一个方向却是极大值(高数中介绍过的,马鞍面)
Adagrad
Adagrad对不同的参数采用不同的学习率,也是其Ada(Adaptive)的名字得来。我们记时间步$t$时标号为$i$的参数对应的梯度为$g_{i}$,即:
Adagrad使用一个系数来为不同的参数修正学习率,如下:
其中,$G_i$是截止到当前时间步$t$时,参数$\theta_i$对应梯度$g_i$的平方和。
我们可以把上面的式子写成矩阵形式。其中,$\odot$表示逐元素的矩阵相乘(element-wise product)。同时,$G_t = g_t \odot g_t$。
我们再来看PyTorch中的相关实现:
1 | # for each gradient of parameters: |
由于Adagrad对不同的梯度给了不同的学习率修正值,所以使用这种方法时,我们可以不用操心学习率,只是给定一个初始值(如$0.01$)就够了。尤其是对稀疏的数据,Adagrad方法能够自适应调节其梯度更新信息,给那些不常出现(非零)的梯度对应更大的学习率。PyTorch中还为稀疏数据特别优化了更新算法。
Adagrad的缺点在于由于$G_t$矩阵是平方和,所以分母会越来越大,造成训练后期学习率会变得很小。下面的Adadelta方法针对这个问题进行了改进。
Adadelta
Adadelta给出的改进方法是不再记录所有的历史时刻的$g$的平方和,而是最近一个有限的观察窗口$w$的累积梯度平方和。在实际使用时,这种方法使用了一个参数$\gamma$(如$0.9$)作为遗忘因子,对$E[g_t^2]$进行统计。
由于$\sqrt{E[g_t^2]}$就是$g$的均方根RMS,所以,修正后的梯度如下。注意到,这正是Hinton在课上所讲到的RMSprop的优化方法。
作者还观察到,这样更新的话,其实$\theta$和$\Delta \theta$的单位是不一样的(此时$\Delta \theta$是无量纲数)。所以,作者提出再乘上一个$\text{RMS}[\Delta \theta]$来平衡(同时去掉了学习率$\eta$),所以,最终的参数更新如下:
这种方法甚至不再需要学习率。下面是PyTorch中的实现,其中仍然保有学习率lr这一参数设定,默认值为$1.0$。代码注释中,我使用MS来指代$E[x^2]$。即,$\text{RMS}[x] = \sqrt{\text{MS}[x]+\epsilon}$。1
2
3
4
5
6
7
8
9
10# update: MS[g] = MS[g]*\rho + g*g*(1-\rho)
square_avg.mul_(rho).addcmul_(1 - rho, grad, grad)
# current RMS[g] = sqrt(MS[g] + \epsilon)
std = square_avg.add(eps).sqrt_()
# \Delta \theta = RMS[\Delta \theta] / RMS[g]) * g
delta = acc_delta.add(eps).sqrt_().div_(std).mul_(grad)
# update parameter: \theta -= lr * \Delta \theta
p.data.add_(-group['lr'], delta)
# update MS[\Delta \theta] = MS[\Delta \theta] * \rho + \Delta \theta^2 * (1-\rho)
acc_delta.mul_(rho).addcmul_(1 - rho, delta, delta)
Adam
Adaptive momen Estimation(Adam,自适应矩估计),是另一种为不同参数自适应设置不同学习率的方法。Adam方法不止存储过往的梯度平方均值(二阶矩)信息,还存储过往的梯度均值信息(一阶矩)。
作者观察到上述估计是有偏的(biase towards $0$),所以给出如下修正:
参数的更新如下:
作者给出$\beta_1 = 0.9$,$\beta_2=0.999$,$\epsilon=10^{-8}$。
为了更好地理解PyTorch中的实现方式,需要对上式进行变形:
代码中令$\text{step_size} = \frac{\sqrt{1-\beta_2}}{1-\beta_1}\eta$。同时,$\beta$也要以指数规律衰减,即:$\beta_t = \beta_0^t$。
1 | # exp_avg is `m`: expected average of g |
AdaMax
上面Adam中,实际上我们是用梯度$g$的$2$范数($\sqrt{\hat{v_t}}$)去对$g$进行Normalization。那么为什么不用其他形式的范数$p$来试试呢?然而,对于$1$范数和$2$范数,数值是稳定的。对于再大的$p$,数值不稳定。不过,当取无穷范数的时候,又是稳定的了。
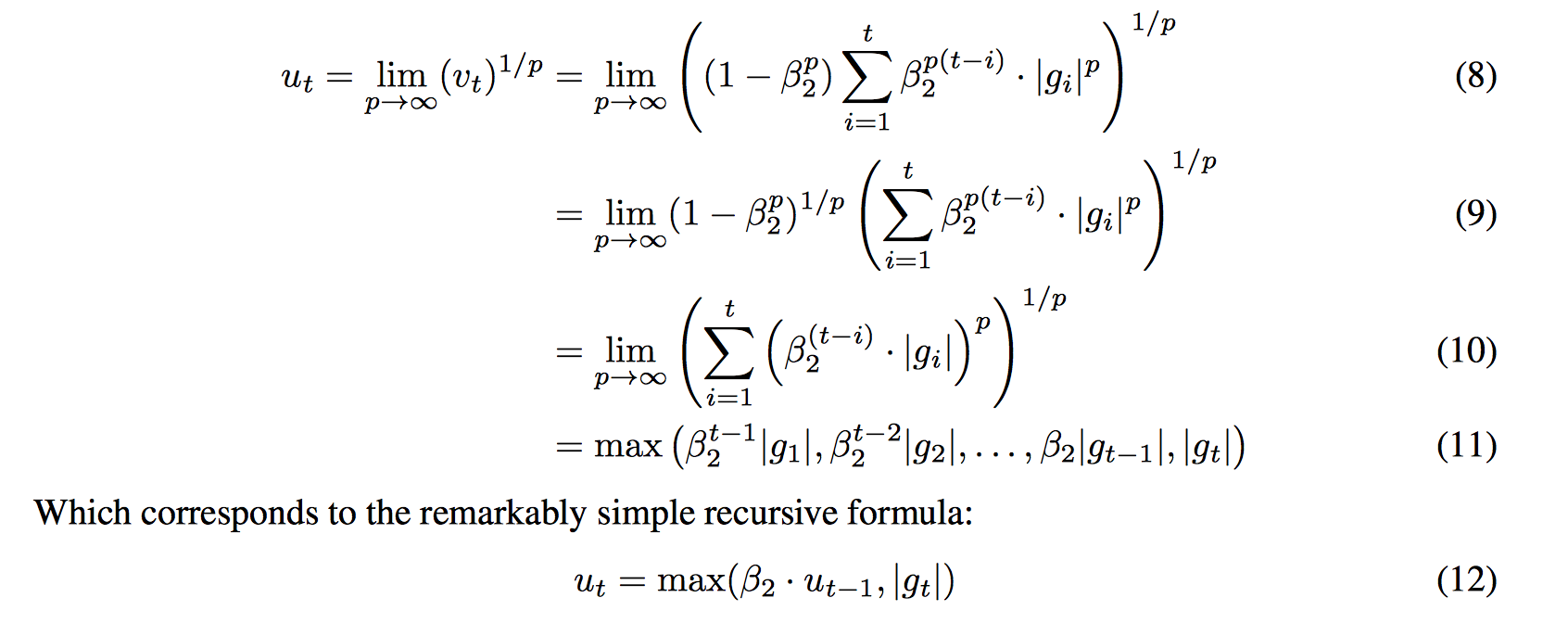
由于无穷范数就是求绝对值最大的分量,所以这种方法叫做AdaMax。其对应的$\hat{v_t}$为(这里为了避免混淆,使用$u_t$指代):
我们将$u_t$按照时间展开,可以得到(直接摘自论文的图)。其中最后一步递推式的得来:根据$u_t$把$u_{t-1}$的展开形式也写出来,就不难发现最下面的递推形式。
相应的更新权重操作为:
在PyTorch中的实现如下:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16# Update biased first moment estimate, which is \hat{m}_t
exp_avg.mul_(beta1).add_(1 - beta1, grad)
# 下面这种用来逐元素求取 max(A, B) 的方法可以学习一个
# Update the exponentially weighted infinity norm.
norm_buf = torch.cat([
exp_inf.mul_(beta2).unsqueeze(0),
grad.abs().add_(eps).unsqueeze_(0)
], 0)
## 找到 exp_inf 和 g之间的较大者(只需要在刚刚聚合的这个维度上找即可~)
torch.max(norm_buf, 0, keepdim=False, out=(exp_inf, exp_inf.new().long()))
## beta1 correction
bias_correction = 1 - beta1 ** state['step']
clr = group['lr'] / bias_correction
p.data.addcdiv_(-clr, exp_avg, exp_inf)