SIFT(尺度不变特征变换,Scale Invariant Feature Transform),最早由Lowe提出,目的是为了解决目标检测(Object Detection)问题中提取图像特征的问题。从名字可以看出,SIFT的优势就在于对尺度变换的不变性,同时SIFT还满足平移变换和旋转变换下的不变性,并对光照变化和3D视角变换有一定的不变性。它的主要步骤如下:
- scale space上的极值检测。使用DoG在不同的scaleast和image position下找到interest point。
- interest point的localization。对上面的interest point进行稳定度检测,并确定其所在的scale和position。
- 确定方向。通过计算图像的梯度图,确定key point的方向,下一步的feature operation就是在这个方向,scale和position上进行的。
- 确定key point的描述子。使用图像的局部梯度作为key point的描述子,最终构成SIFT特征向量。
SIFT介绍
上讲中介绍的Harris角点方法计算简便,并具有平移不变性和旋转不变性。特征$f$对某种变换$\mathcal{T}$具有不变性,是指在经过变换后原特征保持不变,也就是$f(I) = f(\mathcal{T}(I))$。但是Harris角点不具有尺度变换不变性,如下图所示。当图像被放大后,原图的角点被判定为了边缘点。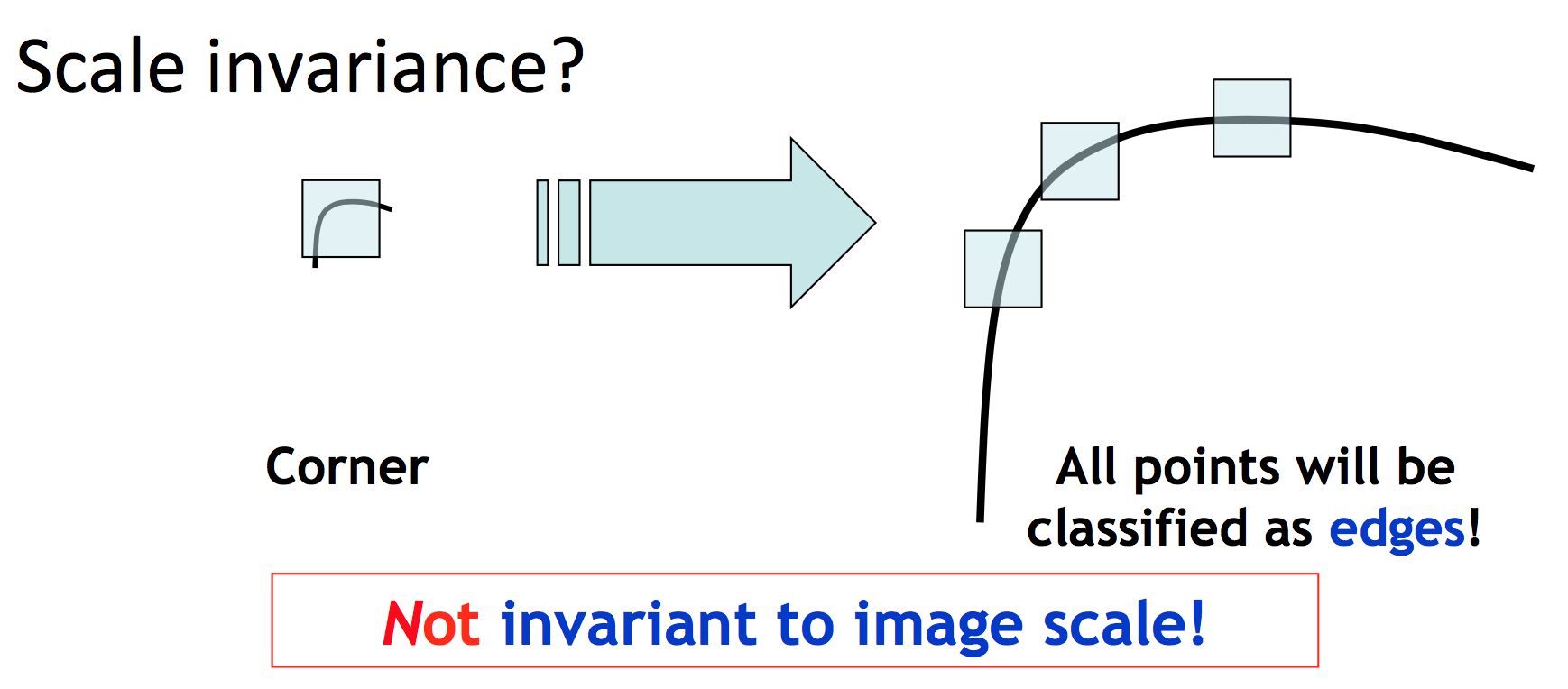
而我们想要得到一种对尺度变换保持不变性的特征计算方法。例如图像patch的像素平均亮度,如下图所示。region size缩小为原始的一半后,亮度直方图的形状不变,即平均亮度不变。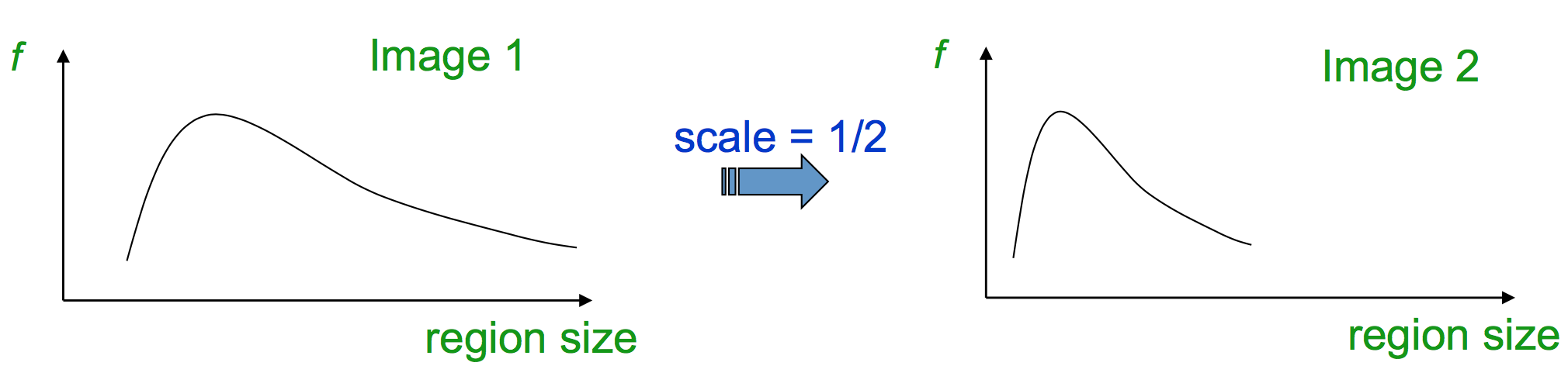
而Lowe想到了使用局部极值来作为feature来保证对scale变换的不变性。在算法的具体实现中,他使用DoG来获得局部极值。
Lowe的论文中也提到了SIFT特征的应用。SIFT特征可以产生稠密(dense)的key point,例如一张500x500像素大小的图像,一般可以产生~2000个稳定的SIFT特征。在进行image matching和recognition时,可以将ref image的SIFT特征提前计算出来保存在数据库中,并计算待处理图像的SIFT特征,根据特征向量的欧氏距离进行匹配。
这篇博客主要是Lowe上述论文的读书笔记,按照SIFT特征的计算步骤进行组织。
尺度空间极值的检测方法
前人研究已经指出,在一系列合理假设下,高斯核是唯一满足尺度不变性的。所谓的尺度空间,就是指原始图像$I(x,y)$和可变尺度的高斯核$G(x,y,\sigma)$的卷积结果。如下式所示:
其中,$G(x,y, \sigma) = \frac{1}{2\pi\sigma^2}\exp(-(x^2+y^2)/2\sigma^2)$。不同的$\sigma$代表不同的尺度。
DoG(difference of Gaussian)函数定义为不同尺度的高斯核与图像卷积结果之差,即,
如下图所示,输入的图像重复地与高斯核进行卷积得到结果图像$L$(左侧),这样构成了一个octave。相邻的$L$之间作差得到DoG图像(右侧)。当一个octave处理完之后,将当前octave的最后一张高斯卷积结果图像降采样两倍,按照前述方法构造下一个octave。在图中,我们将一个octave划分为$s$个间隔(即$s+1$个图像)时,设$\sigma$最终变成了2倍(即$\sigma$加倍)。那么,显然有相邻两层之间的$k = 2^{1/s}$。不过为了保证首尾两张图像也能够计算差值,我们实际上需要再补上两张(做一个padding),也就是说一个octave内的总图像为$s+3$(下图中的$s=2$)。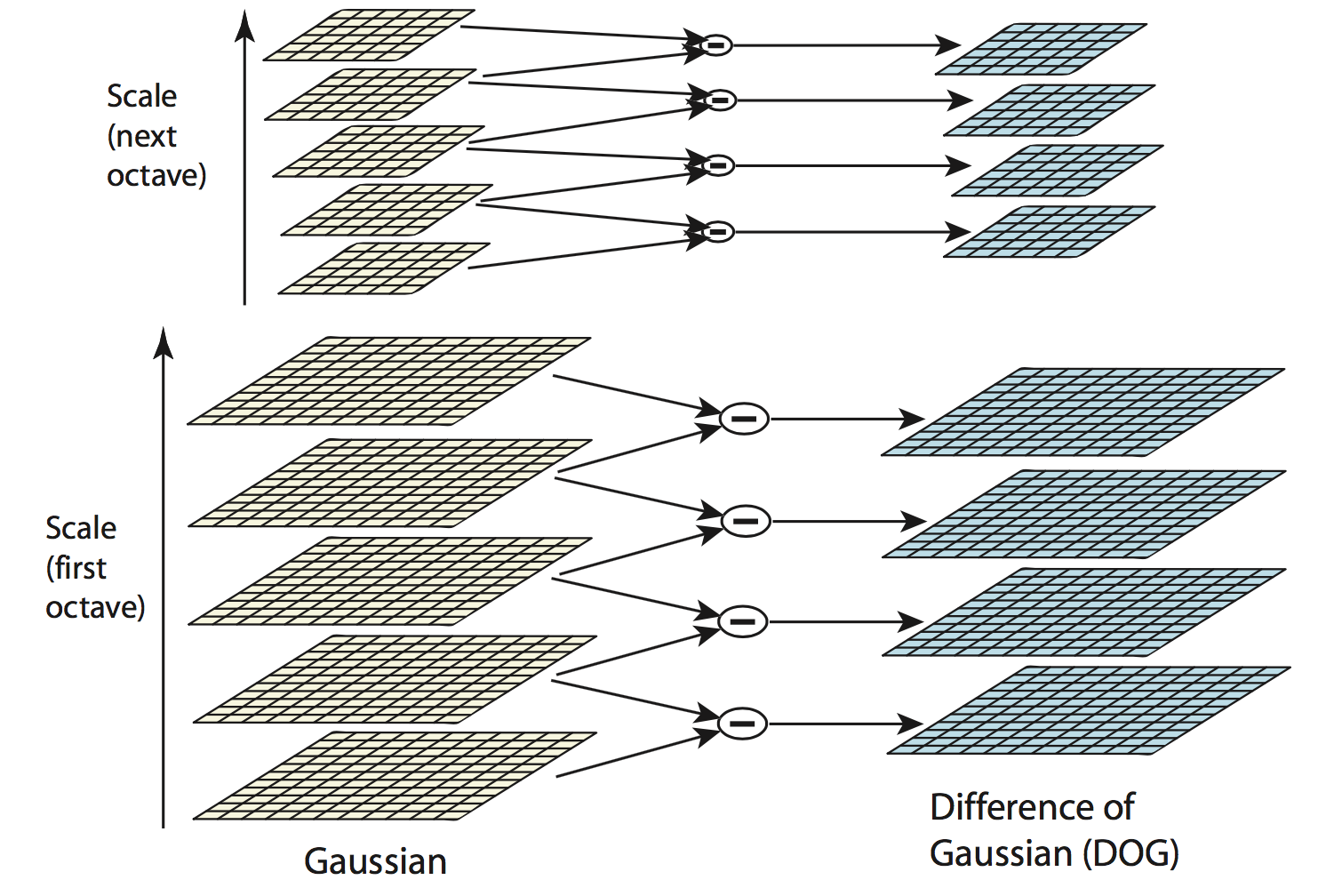
为何我们要费力气得到DoG呢?论文中作者给出的解释是:DoG对scale-normalized后的Guassian Laplace函数$\sigma^2\Delta G$提供了足够的近似。其中前面的$\sigma^2$系数正是为了保证尺度不变性。而前人的研究则指出,$\sigma \Delta G$函数的极值,和其他一大票其他function比较时,能够提供最稳定的feature。
对于高斯核函数,有以下性质:
我们将式子左侧的微分变成差分,得到了下式:
也就是:
当$k=1$时,上式的近似误差为0(即上面的$s=\infty$,也就是说octave的划分是连续的)。但是当$k$较大时,如$\sqrt{2}$(这时$s=2$,octave划分十分粗糙了),仍然保证了稳定性。同时,由于相邻两层的比例$k$是定值,所以$k-1$这个因子对于检测极值没有影响。我们在计算时,无需除以$k-1$。
构造完了DoG图像金字塔,下面我们的任务就是检测其中的极值。如下图,对于每个点,我们将它与金字塔中相邻的26个点作比较,找到局部极值。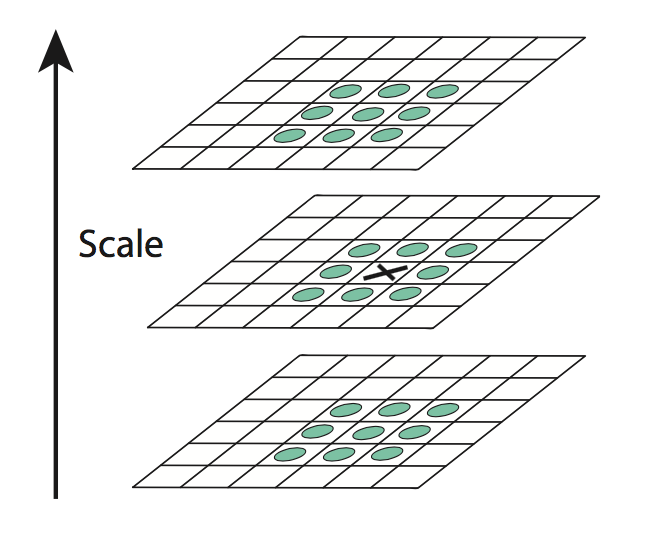
另外,我们将输入图像行列预先使用线性插值的方法resize为原来的2倍,获取更多的key point。
此外,在Lowe的论文中还提到了使用DoG的泰勒展开和海森矩阵进行key point的精细确定方法,并对key point进行过滤。这里也不再赘述了。
128维feature的获取
我们需要在每个key point处提取128维的特征向量。这里结合CS131课程作业2的相关练习作出说明。对于每个key point,我们关注它位于图像金字塔中的具体层数以及像素点位置,也就是说通过索引pyramid{scale}(y, x)就可以获取key point。我们遍历key point,为它们赋予一个128维的特征向量。
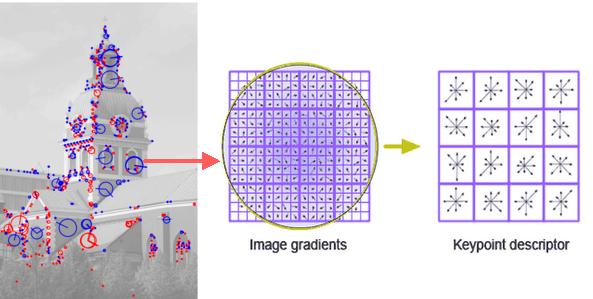
我们选取point周围16x16大小的区域,称为一个patch。将其分为4x4共计16个cell。这样,每个cell内共有像素点16个。对于每个cell,我们计算它的局部梯度方向直方图,直方图共有8个bin。也就是说每个cell可以得到一个8维的特征向量。将16个cell的特征向量首尾相接,就得到了128维的SIFT特征向量。在下面的代码中,使用变量patch_mag和patch_theta分别代表patch的梯度幅值和角度,它们可以很简单地使用卷积和数学运算得到。
1 | patch_mag = sqrt(patch_dx.^2 + patch_dy.^2); |
之后,我们需要获取key point的主方向。其定义可见slide,即为key point扩展出来的patch的梯度方向直方图的峰值对应的角度。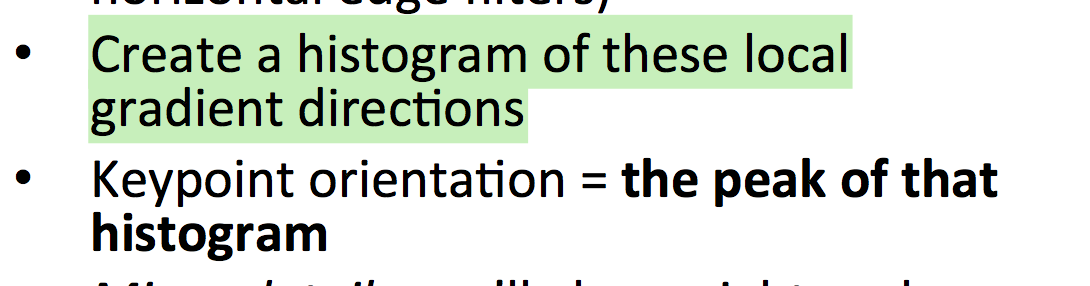
所以我们首先应该设计如何构建局部梯度方向直方图。我们只要将[0, 2pi]区间划分为若干个bin,并将patch内的每个点使用其梯度大小向对应的bin内投票即可。如下所示:
1 | function [histogram, angles] = ComputeGradientHistogram(num_bins, gradient_magnitudes, gradient_angles) |
Lowe论文中推荐的bin数目为36个,计算主方向的函数如下:
1 | function direction = ComputeDominantDirection(gradient_magnitudes, gradient_angles) |
之后,我们更新patch内各点的梯度方向,计算其与主方向的夹角,作为新的方向。并将梯度进行高斯平滑。
1 | patch_theta = patch_theta - ComputeDominantDirection(patch_mag, patch_theta);; |
遍历cell,计算feature如下:
1 | feature = []; |
最后,对feature做normalization。首先将feature化为单位长度,并将其中太大的分量进行限幅(如0.2的阈值),之后再重新将其转换为单位长度。
这样,就完成了SIFT特征的计算。在Lowe的论文中,有更多对实现细节的讨论,这里只是跟随课程slide和作业走完了算法流程,不再赘述。
应用:图像特征点匹配
和Harris角点一样,SIFT特征可以用作两幅图像的特征点匹配,并且具有多种变换不变性的优点。对于两幅图像分别计算得到的特征点SIFT特征向量,可以使用下面简单的方法搜寻匹配点。计算每组点对之间的欧式距离,如果最近的距离比第二近的距离小得多,那么可以认为有一对成功匹配的特征点。其MATLAB代码如下,其中descriptor是两幅图像的SIFT特征向量。阈值默认为取做0.7。
1 | function match = SIFTSimpleMatcher(descriptor1, descriptor2, thresh) |
接下来,我们可以使用最小二乘法计算两幅图像之间的仿射变换矩阵(齐次变换矩阵)$H$。其中$H$满足:
其中
对上式稍作变形,有
就可以使用标准的最小二乘正则方程进行求解了。代码如下:
1 | function H = ComputeAffineMatrix( Pt1, Pt2 ) |
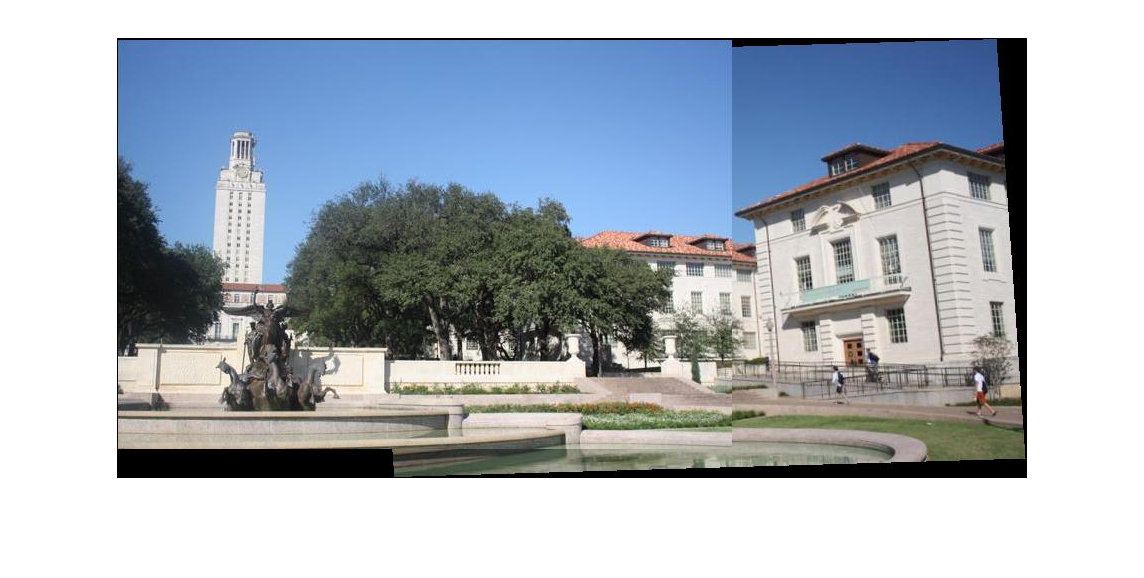
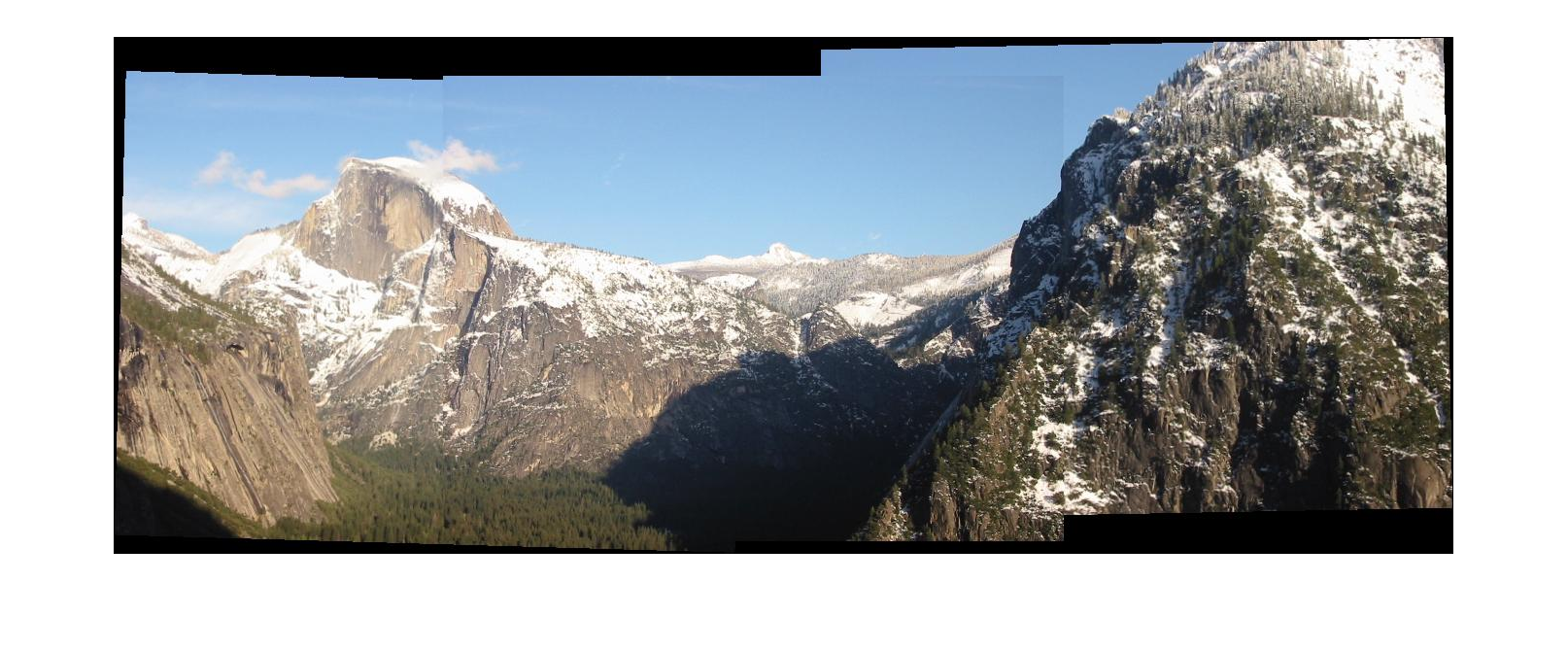
作业中的其他例子也很有趣,这里不再多说了。贴上两张图像拼接的实验结果吧~